
In the Lego robot subproject of the MoDeS3 it was important to integrate the sensor information from the Lego sensors, the control and also the logic responsible for the safety. For this purpose, we have implemented an advanced control protocol in Python. This script runs on an embedded Linux distribution, called EV3dev. With this operating system we can utilize the Lego devices connected to the EV3 brick, while have access to all generic Linux packages, like the mosquitto broker.
The simplified overview of depdendecies is depicted on the next picture:
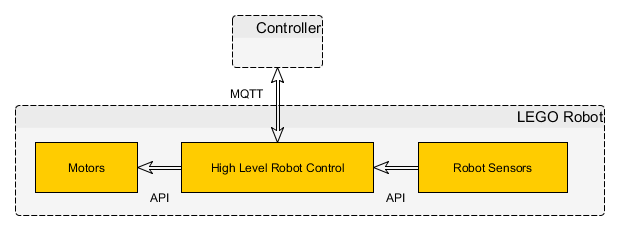
Our logic is able to detect when the motors are overdriven, or the robot is getting to a twisted and dangerous position, and prevents it from further attacking its limits by stopping them. By this protocol other components can control the crane by MQTT messages, or stop it if any other sensor detects something dangerous.
The code snippet below runs in a cycle and if it notices chage in the state of the touch-sensor, sends a message through MQTT (Paho). If needed it also executes some safety routines.

Sensors of the hardware are depicted on the following figures: these sensors provide the information:

The solution is built modularly, each part is responsible for certain movements and sensor information. The control software enables the user to control any of the motors individually, and get back raw sensor data through MQTT. A safety modul is observes the behaviours and available information and intervenes if something goes wrong.