
Cyber-Physical Systems (CPS) are on one hand close to embedded systems as they are also built from sensors, controllers and actuators, where the sensors gather heterogeneous information from the environment, the controllers observe the gathered information and order the actuator to modify the environment according to the observed information. On the other hand, CPS systems are aiming to harvest the benefits of elastic cloud based resources to provide more sophisticated automation services.
As part of the MoDeS3 project we successfully integrated the safety logic that controls our model railways, with IBM Bluemix and Node-RED.
IBM Bluemix
![]()
Bluemix is an open standards, cloud platform for building, running, and managing apps and services. Bluemix is designed to make developers’ lives easier. That’s why it provides developer teams of all sizes with the flexibility to scale compute power at a very granular level, seamlessly collaborate on source code and shared APIs, and manage apps’ performance, logs and costs from a single dashboard.
Bluemix has three open source compute options to power your applications:
- Cloud Foundry: Cloud Foundry is an open source PaaS that offers devs the ability to quickly compose their apps without worrying about the underlying infrastructure. Bluemix extends Cloud Foundry with a number of managed runtimes and services, enterprise-grade DevOps tooling, and a seamless overall developer experience.
- IBM Containers: IBM Containers allow portability and consistency regardless of where they are run—be it on bare metal servers in Bluemix, your company’s data center, or on your laptop. Easily spin up images from our public hub or your own private registry.
- VMs: Virtual machines offer the most control over your apps and middleware. Bluemix uses industry-leading OpenStack software to run and manage VMs in a public cloud, a dedicated cloud, or your own on-premises cloud. Key OpenStack services such as Auto Scaling, Load Balancing, and Object Storage can be used in conjunction with Bluemix services to build and run hybrid apps.
Source of information: IBM Bluemix homepage
Node-RED
Node-RED is a tool for wiring together hardware devices, APIs and online services in new and interesting ways. It provides a browser-based flow editor that makes it easy to wire together flows using the wide range nodes in the palette. Flows can be then deployed to the runtime in a single-click.With over 225,000 modules in Node’s package repository, it is easy to extend the range of palette nodes to add new capabilities.
The light-weight runtime is built on Node.js, taking full advantage of its event-driven, non-blocking model. This makes it ideal to run at the edge of the network on low-cost hardware such as the Raspberry Pi as well as in the cloud.
Source of information: Node-RED homepage
How were model railways integrated with the cloud?

As we describer earlier in a blogpost we designed the model railway control logic, also known as safety logic, with YAKINDU Statechart Tools. YAKINDU Statecharts enabled automatic code generation from the designed statecharts. This way we could directly create the implementation of the safety logic, based on statechart semantics.
However, generating codes automatically were not enough. We had to integrate custom Java codes to the generated codes through an interface. In this way we could connect the statecharts with the physical model railway track, including the BeagleBone Black based embedded controllers.
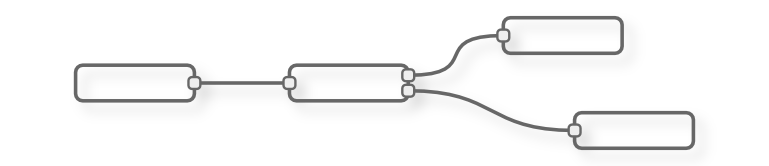
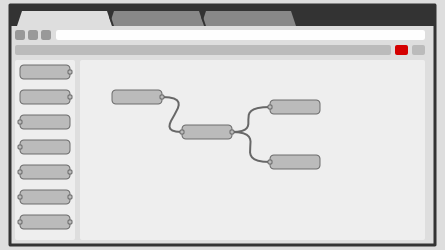
After that as an experiment we designed the communication module, originally implemented in Java and that is neccessary for communication between the statecharts, in Node-RED. The high-level signals used in the communication have been constructed as flows in Node-RED, depicted on the following figure.

As you can see, although different requests, originating from the left-hand side, has different flows containing some functions, they all end in the same response node. It was in order to make the design easier and less redundant, excluding the status and error logging nodes used for debug purposes.
So, as you may have already guessed the Node-RED flows and the generated statechart codes have been deployed into IBM Bluemix. Each turnout has its own statechart and they run separately, connected through the Node-RED flow, to make the communication easier and use cutting-edge Internet of Things technolgy!

We deployed each component (statecharts that control the turnouts and their nearby sections, and the communication module designed in Node-RED) into the IBM Bluemix as a container. Six containers were running the generated Java codes, each in its own, and the seventh container was deploying the Node-RED flow. They were put in the same subnetwork, so all the statecharts could communicate with the Node-RED flow as described above.

On a local machine working at the Fault Tolerant Systems Research Group at BME, only a proxy module was running that received signals from the YAKINDU statecharts to stop the trains if neccessary. This module periodically transmitted status about the track to the cloud, so the statecharts could make decisions based on the real-world sensor information.
Conclusions
Although deploying a safety-critical system into the cloud is strongly opposed, due to network latencies, nondeterministic instabilities of the cloud, noisy neighbours in the virtual machines running in the cloud, etc, it was an interesting experimentation. It was fascinating to see that the section in danger, where the trains could collide, was disabled from the cloud. Despite we did not know where the containers were running exactly in the cloud (e.g. in the EU/USA/Asia), the network latency was low enough not to have serious implications in our case.
We were more than satisfied with the avilability and the stability of IBM Bluemix, so we strongly recommend to give it a try. It has a strong community which is eager to help you if you have any difficulties with the cloud services offer by IBM.
Last but not least, we would like to recommend Node-RED as well. If you are either a Java Script developer, or you would like to connect your embedded systems together, you may find it really useful.
Delivered in cooperation with Daniel.
























{kind=link}