As we mentioned in a former post, Bence, who is our colleague, has developed a model transformation plugin for YAKINDU as well. The plugin transforms a chosen SCT model into timed automata, and automatically generates CTL expressions for formal verification.
Let’s have a look at its theoretical background and a practical example.
Theoretical approach

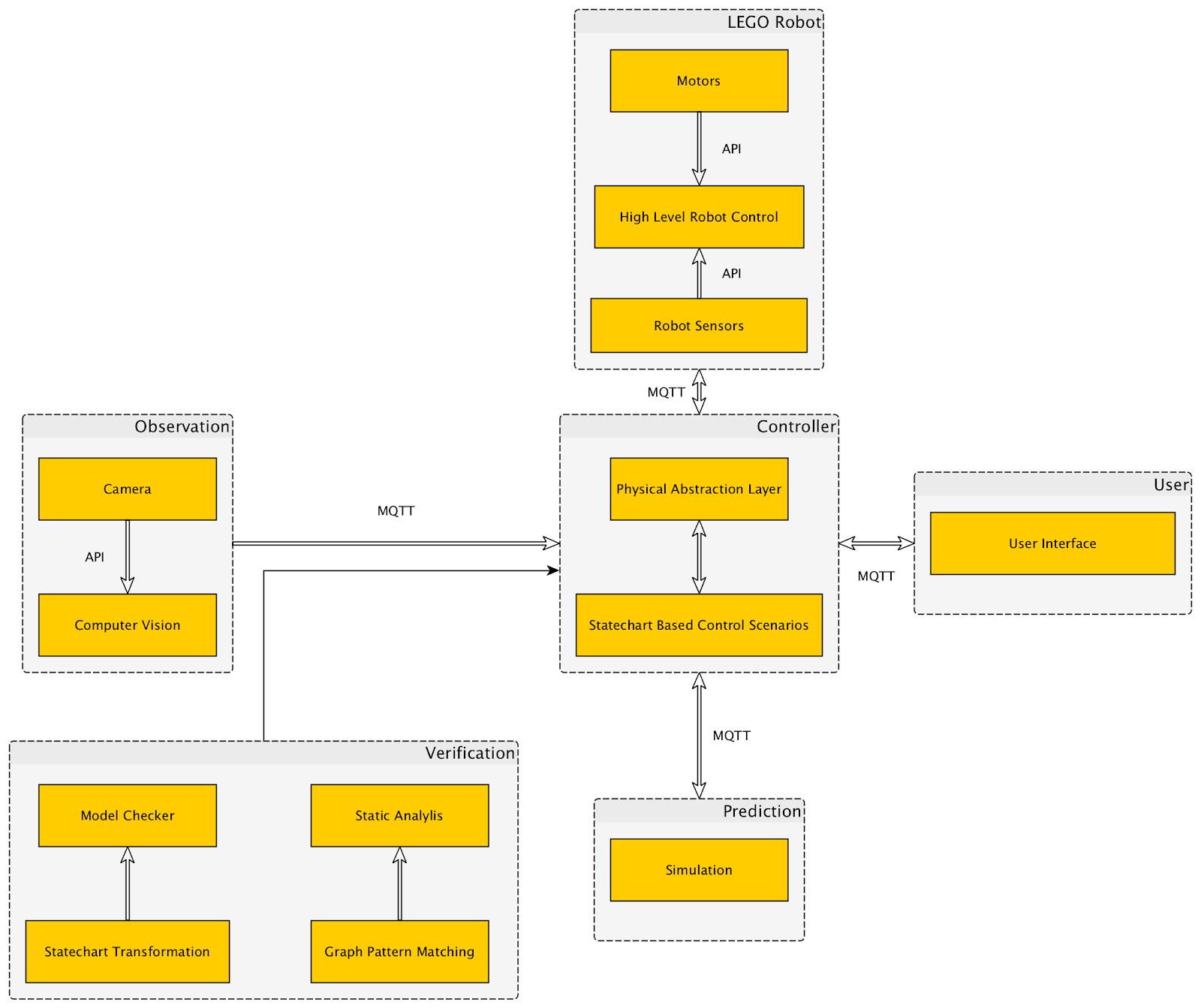
The workflow of the transformation is depicted above. First, the YAKINDU Statecharts to UPPAAL Transformation Engine parses the Statechart design model (the SCT file), and looks for different mathces of structural graph patterns in it.
The patterns were composed in the Query Language of EMF-IncQuery. For composing these patterns the metamodel of the YAKINDU Statecharts were used, because the statcharts in the SCT model are the instances of that metamodel.
After that, the Transformation Engine transforms the given statecharts to timed automata acceptable by UPPAAL. In order to achieve it, we used the metamodel of UPPAAL. The metamodel is publicly available and was designed at the University of Padernborn. The transformation code was written in Xtend and it extensively uses the EMF Reflective API.
Finally, the Transformation Engine creates UPPAAL automata that adhere to the statecharts, and generates CTL expressions to make model checking automatic. You can find details on model checking in a former blogpost.
Practical approach
Now let us show you in an example what our YAKINDU Statecharts to UPPAAL Transformation Engine is capable of. First of all, we need a Yakindu model that we want to transform. We have made a simple timer statemachine just for this demonstration.

As you can see, the model consists of two states. In Idle state the system does not do anything. In Running state the system measures time. Also, there are two events that can be used for controlling the system. Finally, there is an integer variable that symbolizes elapsed time.
Let us transform this statemachine to UPPAAL. This is what we get:

Control template:

As you can see, the transformer creates two templates. The first one is the UPPAAL equivalent of the YAKINDU statechart. The second one is a control template that is used for firing events.
Let us see what transformation rules the transformer uses:
- Events are transformed to synchnronization channels
- Integer variables are transformed to int variables
- Vertices are transformed to locations
- Transitions are transformed to edges
- Updates of transitions are transformed to updates on edges
- Time events (after .. s) are transformed to clock variables, location invariants and guards on outgoing edges
So what can we use this UPPAAL model for? First, you can run simulations on it. With the control template you can fire events, so transitions and actions can take place in the primary process. You can see the actual active locations of templates, you can follow changes in values of variables etc. Here is a picture of a simulation on the timer model:

Second, queries can be created for checking certain properties of our models. Let us say you want to know whether your statemachine is able to reach a certain state, or a value of a variable can be negative. You just have to create a query that describes the condition and the Verifier will tell you whether it is possible or not in your model. If it is possible, even a simulation trace is created that shows you the transitions taking your model into the certain state. Let us show you some queries:

The first query checks whether there can be a deadlock in the system. Fortunately, the model has been designed well, so deadlocks cannot take place.
The second and third queries check whether Running or Idle states can be reached. We create states because we want to reach them. If a state is unreachable, then something is wrong with the model.
The fourth query checks whether time can be measured for longer than 9 seconds. We created this model to measure time, and according to the Verifier we can do so for at least 10 seconds.
The fifth query checks whether the elapsed time can be a negative value. If it was possible, then something would be very wrong with the model. Fortunately, this is not the situation now.